RKC提高控制性(ARW型PID控制版)
本节说明如何通过 ARW 型 PID 控制来提高可控性。
①关于ARW型PID控制的自整定
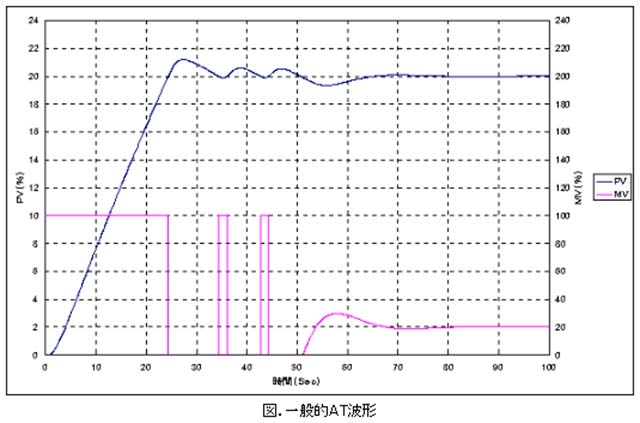
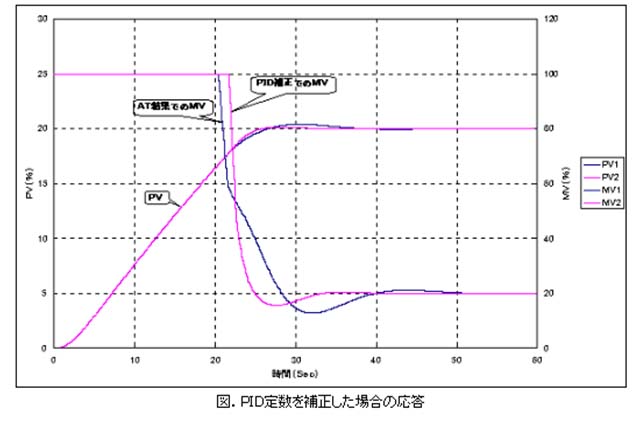
自动调谐(AT)是一种自动确定与您想要控制的内容(控制目标)相匹配的 PID 常数的功能,并且也适用于配备 ARW 型 PID 的型号。
在操作中,PID 常数是根据输出 0-100% 的 On/Off 控制下温度测量值 (PV) 的变化来计算的。
配备 ARW 型 PID 的 AT 型号设计为具有比增强型 AT(Brilliant PID 控制 AT)更温和的 PID 常数(更宽的比例带、更长的积分和微分时间)。
*1 关于增强型 AT,请参阅“ 1. 提高可控性(卓越 PID 控制版) ”。
②关于改变 SV 时的响应与 PID 常数的关系
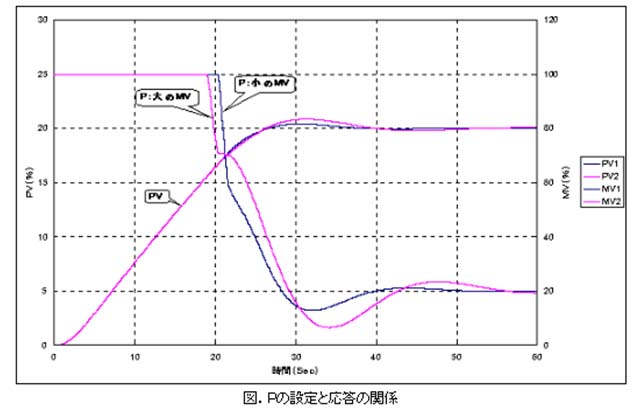
当由于 SV 变化导致输出饱和至 100%(或 0%)时,PID 常数和 PV 的响应速度和过冲(或下冲)可以看到以下趋势。
P:小→过冲:小,响应速度:稍慢
P:大 → 过冲:大,响应速度:稍快
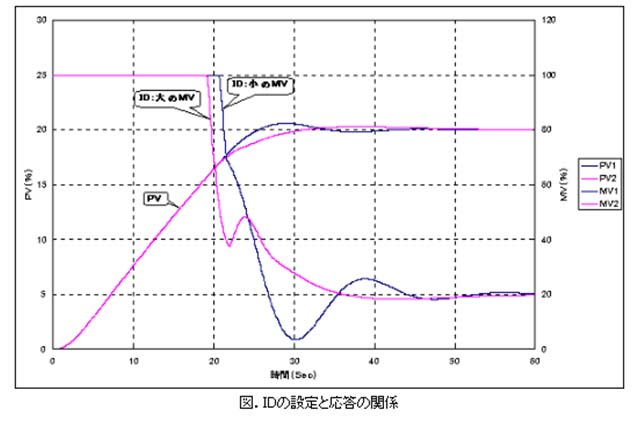
ID:小→过冲:大,响应速度:快
ID:大→过冲:小,响应速度:慢
③改变SV时如何减少过冲(下冲)
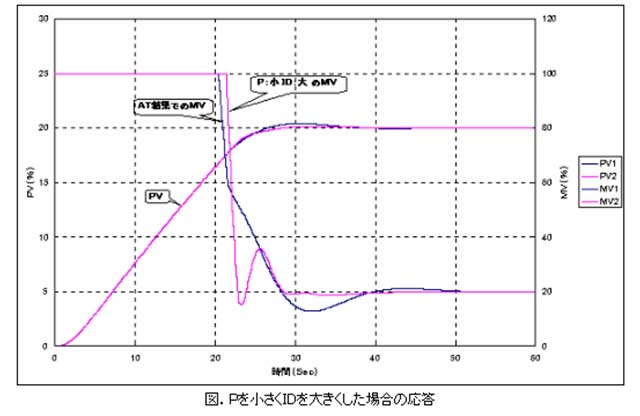
为了减少 SV 变化较大时的过冲(下冲),导致输出因 SV 变化而饱和,考虑到上述 PID 常数与响应之间的关系,减小比例带(P),增加比例带(P)是有效的。积分时间 (I) 和微分时间 (D)。
然而,这种方法并不是一个好主意,因为响应本身会很慢。
此外,配备 ARW 型 PID 的型号的 AT 往往比增强型 AT(用于出色 PID 控制的 AT)具有更温和的 PID 常数(更宽的比例带、更长的积分时间和微分时间),因为它被计算为一个较大的值,请注意,根据 AT 结果增加 ID 可能会引起一些振动。
(从AT结果开始手动调整时,简单地减小比例带(P)是有效的。)
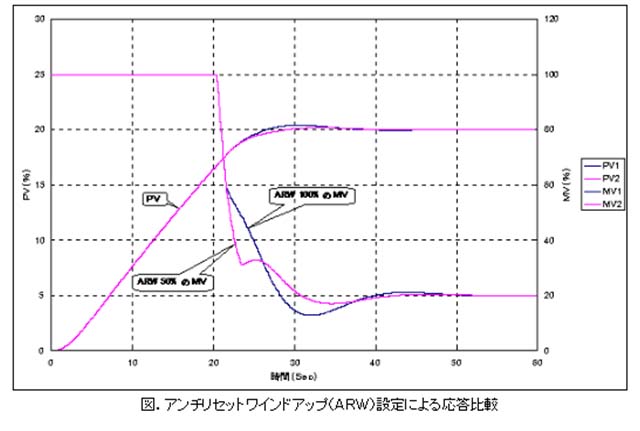
另一方面,在配备ARW型PID控制的机型中,有一个设置项目(防复位饱和:加热侧比例带的%设置)指定积分应用的范围作为防止超调的函数(下冲)也可以通过减小 来抑制过冲(下冲)。 (此方法通常也会减慢响应速度。)
★ 快速说明:配备ARW 型PID 的型号的AT 结果如下所示,以显示 PID 常数比增强型AT 的PID 常数宽松得多。
(注:常数根据负载率条件等而变化,因此以粗略范围表示。)
比例带(P) → 1.5 ~ 2.5 倍
积分时间(I)和微分时间(D) → 1 .2至1.7倍
当 SV 变化较大而导致输出饱和时,为了在不降低响应速度的情况下减少过冲(下冲),应减小比例带(P)和积分时间(I)和微分时间 (D)。
作为根据配备 ARW 型 PID 的型号的 AT 结果进行手动调整时的指导,请使用比增强型 AT(Brilliant PID control AT)结果温和一点的 PID 常数(更宽的比例带、更长的积分时间和微分)时间)进行相应调整是个好主意。 (
带ARW型PID的机型AT结果与增强型AT结果的区别请参见“注”)。