提高可控性(Brilliant PID控制版
目前我们的产品中安装的PID控制方法主要有两种类型。
一种是ARW型PID控制(抗复位饱和型PID控制),自从首次作为数字PID控制器销售以来,仍然安装在比较通用的产品中。
另一种是被称为Brilliant PID的控制方法,该方法安装在高性能型号中。
我们将根据每种 PID 控制方法和自动调整结果来说明如何进一步提高可控性。
在这里,我们将解释如何通过出色的 PID 控制来提高可控性。
①关于辉煌PID控制自动整定(增强型AT)
自动调整(AT)是一种自动确定适合您想要控制的对象(控制目标)的 PID 常数的功能,配备 Brilliant PID 的型号具有称为增强型 AT 的自动调整功能。
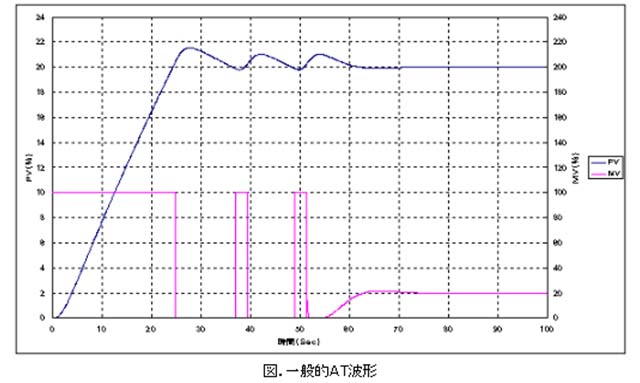
在操作中,PID 常数是根据输出 0-100% 的 ON/OFF 控制期间温度测量值 (PV) 的变化计算的。
本来,当控制稳定时,以设定值(SV)执行AT,使得输出值(负载率)为50%时,可以计算出更准确的PID常数。
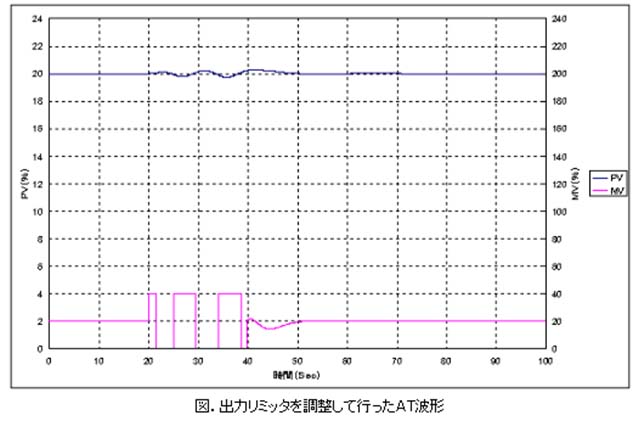
然而,实际上,通常不可能选择导致负载系数为 50% 的 SV,在这种情况下,通过设置输出限制器的上限和下限来执行 AT 会更准确,以便求出负载系数的中心值。
(例如,当负载率为20%时,建议将输出限制器上限值设置为40%。)
对于配备出色PID控制的型号,可以设置输出限制器上限值和下限值,而在计算增强AT的PID常数时,可以将输出限制器上限值设置为40%,因为也考虑了信息,所以可以通过改变输出限制器来进行AT。
*请注意,对于ARW型控制器,如果设置输出限制器并执行自动调节,将无法获得准确的PID常数。
作为其应用,当您想要对不希望输出突然变化(0-100%波动)的控制目标执行 AT 时,可以通过在百分之几到几十的范围内改变输出来执行 AT。以负载因子为中心的百分比,您可以做到。 (例如,当负载率为20%时,要执行输出波动幅度为10%的AT,则需要将输出限制器上限设置为25%,同样将下限设置为15%。
)请注意不要忘记实际执行控制时,将输出限制器上限值和下限值恢复为原始值(输出限制器上限值:100%,输出限制器下限值:0%)。
★ 快速备忘录
从 0-100% 执行 AT 的结果来看,为了根据负载系数修正 PID 常数,建议使用以下值更改积分时间 (I) 和微分时间 (D)指导。
负载率20%→I、D:约减少20%
负载率10%→I、D:约减少30%
②改变SV时的响应与PID常数的关系
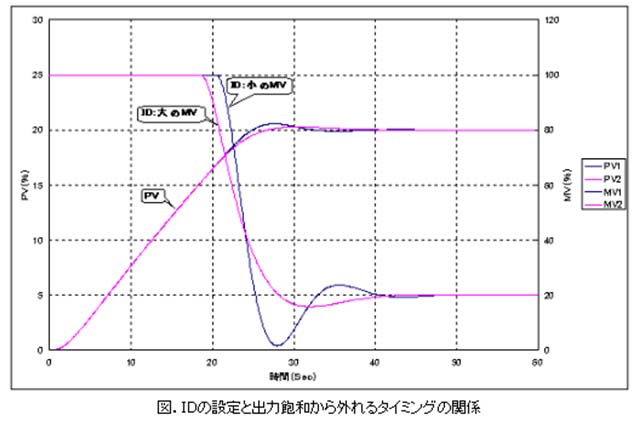
当输出因 SV 变化而饱和至 100%(或 0%)时,PID 常数与输出运动之间存在如下关系。
I、D → 可以改变输出脱离饱和的时间。ID
越大,输出脱离饱和的速度越快。ID
越小,输出脱离饱和的速度越慢。
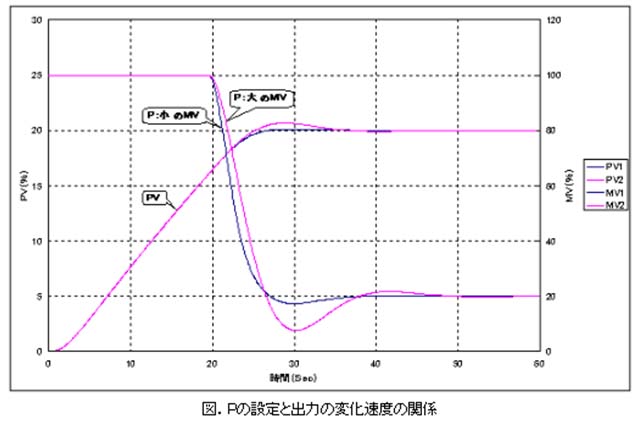
P → 输出后。超出饱和状态时,可以改变输出的变化率。如果
P较小,则输出的变化率会较快。如果
P较大,则输出的变化率会较慢。
从这些关系中,当输出因 SV 变化而饱和于 100%(或 0%)时,PV 响应速度和过冲量(或下冲量)可以看出以下趋势。
ID:大→过冲:小,响应速度:慢
ID:小→过冲:大,响应速度:快
P:小→过冲:小,响应速度:稍慢
P:大→过冲:大,响应速度:
制作时SV 变化较大,由于 SV 变化较快,导致输出饱和,为了在不降低响应速度的情况下抑制过冲,应尽可能长时间地保持输出饱和状态,并且不要突然降低输出。具体来说就是修改P和ID使其变小。
但请注意,如果该值太小,PV 可能会振动。